Common Axis Parameters
Three types of axes are available: Servo, Digitizing and Virtual Servo. All types have common parameters related to an axis.
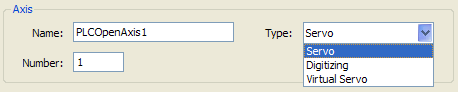
Figure 5-22: PLCopen Axis Parameters
| Parameter | Description |
|---|---|
| Name | The user-defined name of the axis. The name can consist of 1-16 alphanumeric characters. Spaces are not allowed in the name. The Axis Name identifies the axis displayed on the KAS Simulator. |
| Type |
A Servo axis is closed loop: commands are sent to the axis and feedback is read from the axis. A Digitizing axis is read-only, open loop: only secondary feedback is read from the axis. Secondary feedback can be read by reading the actual position of the axis assigned to the secondary feedback. Digitizing axes always use the second feedback for the Drive. KAS only allows a digitizing axis on a drive which already has a servo axis assigned. A Virtual Servo is a servo axis with no feedback or drive hardware. The feedback for a virtual servo axis is automatically generated from the command position. There is no limit to the number of virtual axes that may be used in an application. |
| Number | The axis number (1-256) specifies the axis for PLCopenA vendor -and product- independent worldwide association active in Industrial Control and aiming at standardizing PLC file formats based on XML motion function blocks. |
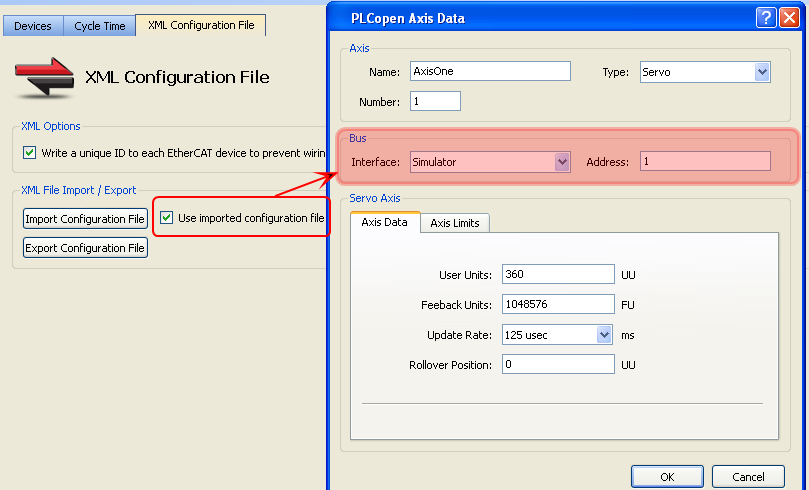
The Digitizing axis type has some additional Bus parameters to define the fieldbus.

Figure 5-23: PLCopen Axis - Bus Parameters
The bus parameters are:
| Parameter | Description |
| Interface |
The type of bus interface, including: Since the EtherCAT setup does not support a digitizing axis, you have to specify the bus interface so the KAS IDE"Integrated development environment" An integrated development environment is a type of computer software that assists computer programmers in developing software. IDEs normally consist of a source code editor, a compiler and/or interpreter, build-automation tools, and a debugger can create the axis correctly. |
| Address | The digitizing Address is the EtherCAT address of the device in the network. It is the 4-digit node address of the servo driveA servo drive is a special electric amplifier used to power electric servo motors. It monitors feedback signals from the motor and continually adjusts for deviation from expected behavior on the bus. This address is required to assign a digitizing axis to an EtherCAT node that already has a servo axis assignment. The address for the EtherCAT slaves are defined as follows.
|
-
-
For more information see Working With A Digitizing Axis in PLCopen.
-
-
The bus parameters are also displayed when you choose to import an external XML file to describe the EtherCAT Motion Bus.
|
Stay Connected with Kollmorgen       
|
Copyright © 2018 Kollmorgen |
|